






深圳泰科智能小型通用伺服驱动器,带EtherCAT总线,RS232总线 ,14-80V直流供电,连续电流最大15A,高精度,可编程,小体积,易安装,可插入,省空间。
主要特性:
| 伺服驱动器系列 | ADM系列精密可编程直流伺服驱动模块 |
| 驱动电机 | 直线(DDL)、力矩(DDR)、音圈、有刷、无刷电机 |
| 控制模式 | 运动序列、点到点、PVT 电子齿轮、凸轮 位置/速度/转矩周期同步( CSP,CSV,CST) |
| 运行模式 | 独立可编程控制(Stand-alone)、外部控制、或分布式网络控制 |
| 通信类型 | RS232、EtherCAT |
| 输入输出 | 1个±10V模拟量输入 11 个数字量输入, 6 个数字量输出,无光隔。 |
| 反馈 | 正交增量编码器,最大速率5M line/s(4倍频后20M) 数字霍尔(U,V,W,120°电气相位差) 模拟量正余弦编码器(Sin/Cos)可选 第 2 编码器输入或输出(全闭环控制) 松下增量编码器( A 格式) SSI, EnDat,Absolute A 多摩川与松下绝对值编码器 A 尼康与三洋绝对值编码器 A |
| 单一直流电源供电 | +14~80V(直流) ,连续电流最大15A,峰值电流最大30A(直流) |
| 全面的保护设计 | 过流、短路、接地、过压、欠压、I2t、控制错误 |
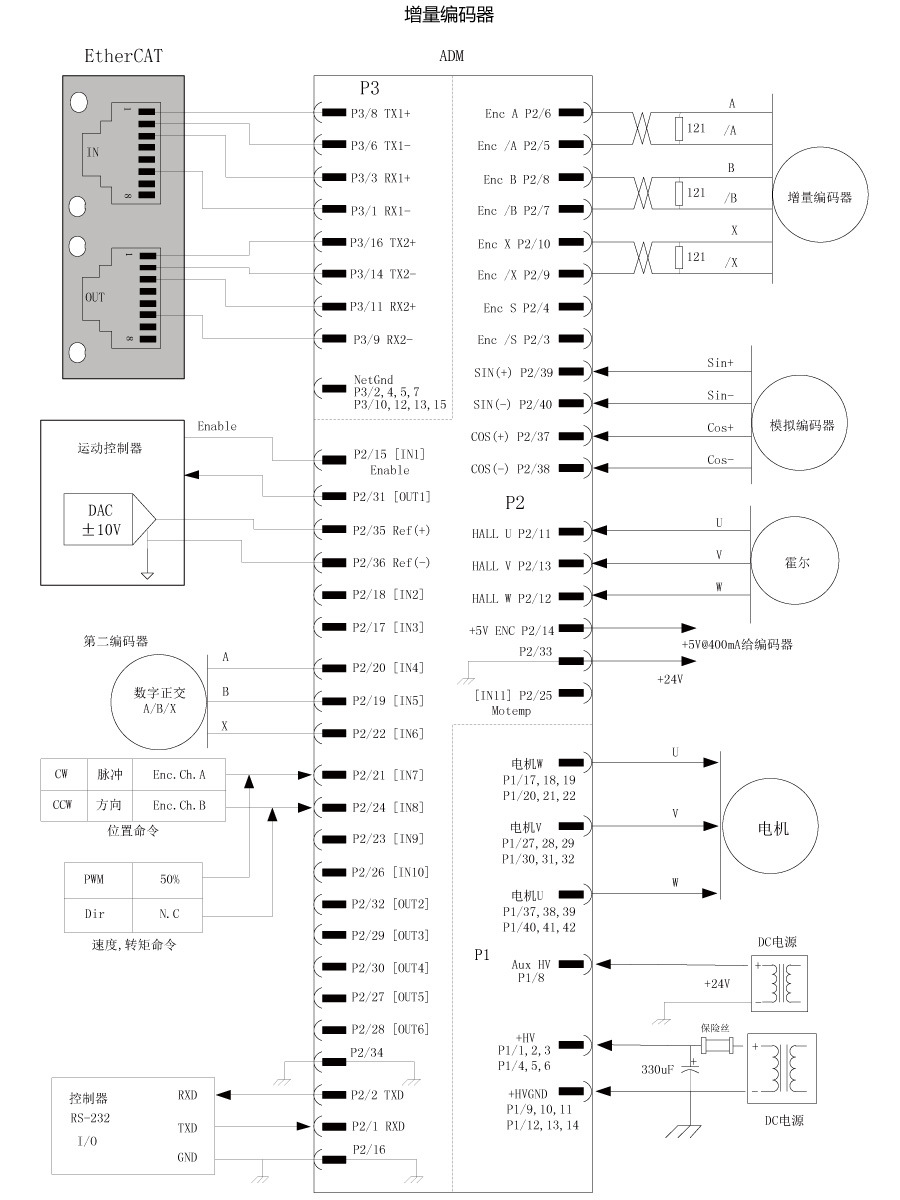
接线图:

驱动器安装尺寸:




















