 机器人的ROS模型建立
机器人的ROS模型建立
这个系列主要介绍机器人ROS模型的建立方法,ROS系统带来的好处之一就是:
我们无需自己建立复杂的数学模型来描述自己的机器人几何尺寸、运动学和动力学等,只需要用它提供的模型描述方法即可实现快速建模。
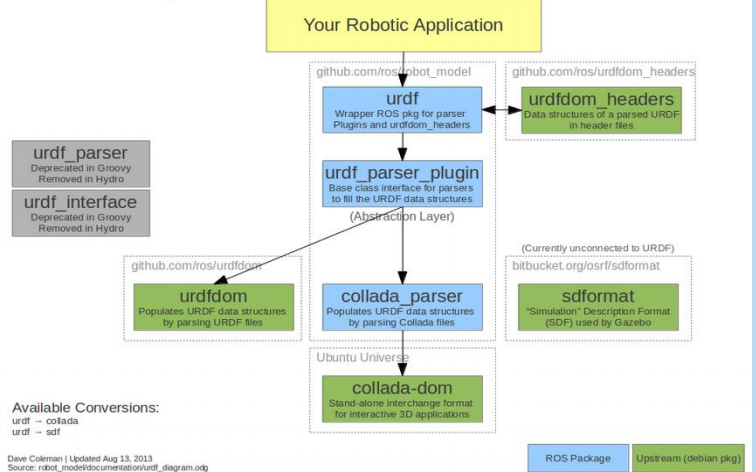
ROS系统的模型描述方法主要有两种格式: URDF 和 XACRO。
URDF:用于描述一些简单的机器人模型,参考官网:URDF官方介绍(初学者一定要精读这些文档)。
XACRO:应用更普遍的机器人模型描述文件,参考官网:xacro,它有如下几个特点:
1.语法简练。采用编程话的脚本语言格式,可以定义变量、常量、引入数学表达式等,极易上手。
2.方便复用。它可以进行一系列的宏定义,并且可以包含其他.xacro文件。
下面,开始用xacro文件建立Rob的机器人模型。
1.第一部分是文件的头和一些宏定义
robot name我们可以自己随便定义,然后分别给出了几组颜色和常数的定义,最后给出了关节传动部分的宏定义。
< ?xml version="1.0"? >
< robot name="rob_robot" xmlns:xacro="http://ros.org/wiki/xacro" >
< !-- Include materials -- >
< material name="Black" >
< color rgba="0.0 0.0 0.0 1.0"/ >
< /material >
< material name="White" >
< color rgba="1.0 1.0 1.0 1.0"/ >
< /material >
常量的定义方法如下,在引用这里定义的常量的时候,用**{XX},例如在如果在下面的代码中想引用M_PI,只需要用:**{M_PI} 即可。
< !-- Constants -- >
< property name="deg_to_rad" value="0.01745329251994329577"/ >
< property name="M_PI" value="3.14159"/ >
关节的传动参数宏定义方法如下,xacro:macro name 定义了本宏的名称。
这个名称由用户定义,后续引用该宏的时候就是根据名字来的。
具体如何操作参考下文介绍或git上的源代码。
注意,这里宏定义内部的一些具体数值仅为说明而存在,具体的机器人关节应该是不一样的。
< !-- transmission block macro definition -- >
< xacro:macro name="transmission_block" params="joint_name" >
< transmission name="tran1" >
< type >transmission_interface/SimpleTransmission< /type >
< joint name="${joint_name}" >
< hardwareInterface >PositionJointInterface< /hardwareInterface >
< /joint >
< actuator name="motor1" >
< hardwareInterface >PositionJointInterface< /hardwareInterface >
< mechanicalReduction >1< /mechanicalReduction >
< /actuator >
< /transmission >
< /xacro:macro >
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28412浏览量
207031 -
模型
+关注
关注
1文章
3241浏览量
48831 -
ROS
+关注
关注
1文章
278浏览量
17006
发布评论请先 登录
相关推荐
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优
发表于 07-05 08:52
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
【ROS RIKIBOT基础--使用系列 第一章节】ROS机器人硬件系统 精选资料分享
【ROS RIKIBOT基础–使用系列】ROS机器人硬件介绍1.RIKIBOT机器人硬件介绍1.1硬件框架ROS
发表于 07-30 06:59
最实用的STM32和ROS机器人的串口通信方案
全网最实用的STM32和ROS机器人的串口通信方案小白学移动机器人同名公众号:小白学移动机器人创作声明:内容包含虚构创作内容中的情节存在虚构加工,仅供参考全网最实用的STM32和
发表于 08-20 06:33
【抢鲜体验】--- Tran***ot ROS教育机器人
本帖最后由 mu0543 于 2021-11-25 20:23 编辑
如果你热衷于编程探索和DIY创作,恰好又在寻找一款可以让你自由发挥,二次开发的ROS平台,那么我们今天体验的这款Tranbot ROS教育机器人将会非常
发表于 11-25 20:13
【抢鲜体验】- Tran***ot ROS教育机器人
Tran***ot ROS教育机器人如果你热衷于编程探索和DIY创作,恰好又在寻找一款可以让你自由发挥,二次开发的ROS平台,那么我们今天体验的这款Tranbot ROS教育
发表于 11-25 20:33
如何搭建实体机器人ros底盘
目录介绍一、底盘主控板二、嵌入式开发板1. 与上位机pc的关系2. 与STM32主控板的关系介绍自下而上的分析实体机器人(差分轮速机器人)搭建中的关键过程。一、底盘主控板本部分搭建实体机器人r
发表于 01-20 07:36
怎样将微型ROS移植到机器人的RA MCU中呢
瑞萨电子公司与专门从事中间件解决方案的公司 eProsima 合作,将微型 ROS 移植到 RA 微控制器 (MCU) 中,以便更轻松地开发用于物联网 (IoT) 和工业系统的专业机器人应用程序
发表于 02-11 06:19
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01
ROS教程之如何构建ROS机器人模型URDF学习资料免费下载
URDF ( Unified Robot Description Format )直接的翻译就是“统一机器人描述格式”,是一种特殊的xm|文件格式,作为机器人的一种通用使用的描述文件。 ROS中
发表于 10-15 08:00
•30次下载





 工商网监
工商网监
评论