 ROS2中自带例程测试
ROS2中自带例程测试
如果你是一个ROS2的开发者,可能对刚才我们使用的ROS2命令比较熟悉,这时你可能也会产生一个问题:我们之前也安装了ROS2系统,那ROS2的原生功能还可以正常运行么?
我们再来试一试ROS2中自带的一个例程。
和刚才一样打开两个终端,这里我们需要source一下ROS里的环境变量。
该环境变量我们刚才已经设置了过软连接,所以配置过程中它也会配置ROS2的功能包路径。
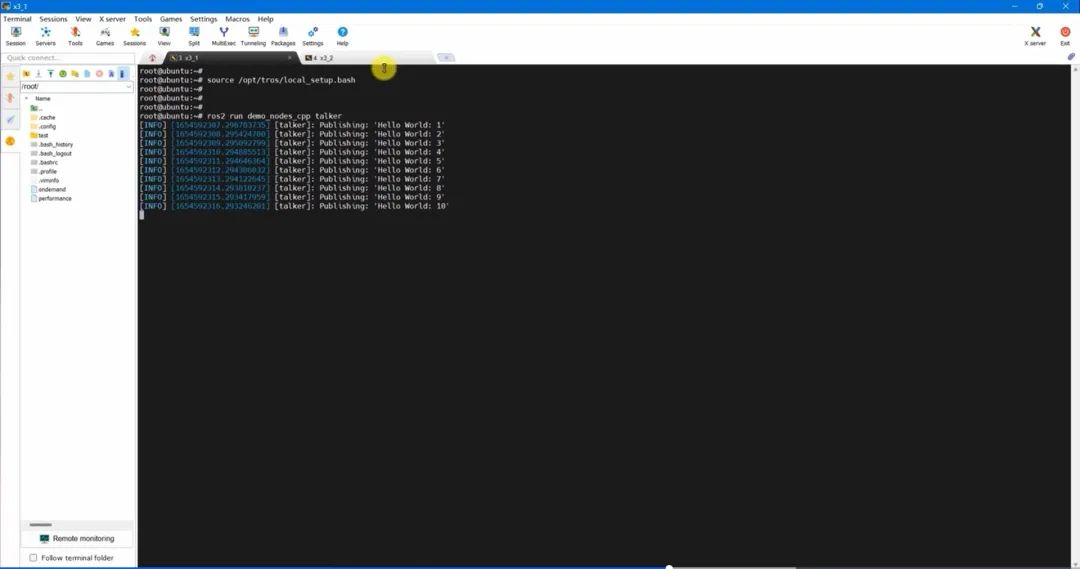
在终端1输入命令:
$ source /opt/tros/local_setup.bash
在终端2,也输入同样的命令,配置环境变量的脚本:

接下来运行两个ROS2的节点。
这两个节点的功能包是属于ROS2里的功能包,可以直接调用到。
我们来尝试一下输入命令ros2 run,再输入功能包名称,如果按Tab自动补全文件名,说明可以找到对应的这个功能包:
ros2 run demo_nodes_cpp talker
talker也是一个发布者节点。按回车运行,可以看到终端1的发布者节点以每秒1次的频率发布消息。
同样,我们到终端2中打开订阅者节点:
ros2 run demo_nodes_cpp listener
回车运行,很快两个终端间就建立了通讯。
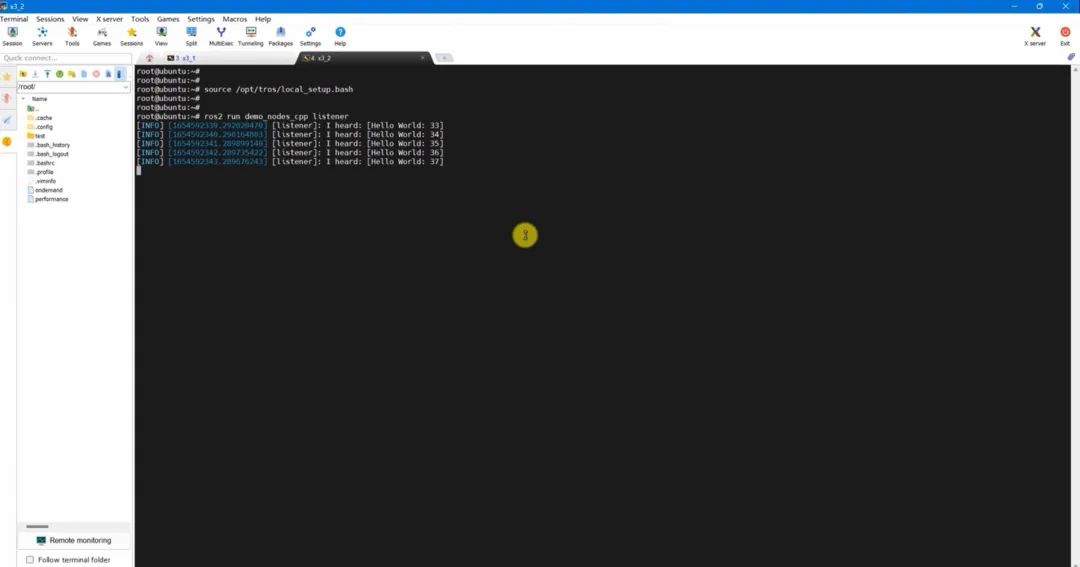
这样就使用ROS2里的例程实现了话题通信连接,只不过这里我们使用的就是ROS2原生的功能包了,而不是TogetherROS™·Bot的功能。
通信系统已经没问题了,但看上去似乎还不太直观。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28390浏览量
206957 -
程序
+关注
关注
117文章
3785浏览量
81009 -
ROS
+关注
关注
1文章
278浏览量
17004
发布评论请先 登录
相关推荐
Micro-ROS:把ROS2放在MCU上
机器人的发展。 ROS便是为机器人在研发的过程中的代码复用提供支持的开源框架,大量的机器人开源项目,从感知到控制、从定位到构图、从导航到可视化,几乎都使用ROS作为基础。 Micro-
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
如何在ROS2中运行小乌龟呢
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-05 06:08
RT-Thread实时操作系统与ROS2是怎样进行通信的
的 API,主要区别就在于 rosserial 是针对 ROS1,而 micro_ros 是针对 ROS2 。第一代的 ROS 发展很多年后,当然也暴露出很多设计不合理的地方,比如有
发表于 04-01 11:38
基于无线wifi网络的X3派和PC虚拟机通过ROS2实现跨设备通信
1、X3派和PC虚拟机都连接无线wifi网络的情况下通过ROS2实现跨设备通信多机通信是ROS的基础能力之一,相比于ROS1,ROS2通过非常简单的配置即可实现多机通信。对于两个安装了
发表于 07-13 15:13
教你一步步创建自己的ROS2工作空间应用
,IP地址替换为自己的实际IP地址。ssh root@192.168.31.1922、在X3派中执行下面的命令脚本进行系统的更新以及ROS2编译环境依赖安装apt -y update &
发表于 11-24 15:00
【昉·星光 2 高性能RISC-V单板计算机体验】四:在 VisionFive2 上安装 ROS2 humble
/suitesparse-devel-5.10.1-2.oe2203.riscv64.rpm
安装 ROS2 humble
packages.list(见附件)中列了现阶段已经支持的软件包,可以在 packages.list
发表于 09-04 03:33
【昉·星光 2 高性能RISC-V单板计算机体验】五:在 VisionFive2 上体验 ROS2 humble
Call `ros2 <command> -h` for more detailed usage.
二、基础命令测试
ros2 pkg
执行 ros2 pkg
发表于 09-04 04:59
Linux嵌入式开发笔记(六)在ROS2中运行小乌龟实例
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-02 15:21
•10次下载

ROS2中使用Gtes示例的详细讲解
阿里云官方镜像站:ROS2源 https://developer.aliyun.com/mirror/?utm_content=g_1000303593 一、准备工作 创建工作空间,即编写代码的位置
发表于 11-12 12:04
•1029次阅读
Window10怎么安装ROS2
Window10怎么安装ROS2,以下的操作都要管理员的权限,我可以提前剧透,我应该应该是没有安装上DDS,应该是算安装好了80%的样子。
了解ROS2是什么
ROS2是从底层构建时便考虑使其适用于商业用途,它是机器人操作系统现有框架的重构,经过优化以适用于工业应用,开发可在新的应用中进行扩展,如移动机器人、无人机群和自动驾驶汽车。
DDS在ROS2中的应用
DDS在ROS2中的应用 DDS在ROS2系统中的位置至关重要,所有上层建设都建立在DDS之上。在这个ROS2的架构图中,蓝色和红色部分就是

在TogetherROS中如何安装ROS2功能包
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2






 工商网监
工商网监
评论