 RobotStudio中创建和控制变位机的详细步骤
RobotStudio中创建和控制变位机的详细步骤
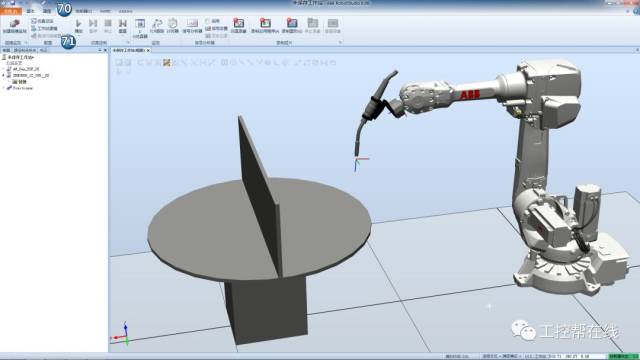
在实际仿真应用中我们时常要做一些旋转机械装置,下面就让我们一起来学习一下在RobotStudio中如何创建变位机机械装置并用时间管理器连接控制信号从而达到控制变位机的目的,爱学习的小伙伴们我们一起出发吧。
打开并创建新的空工作站。

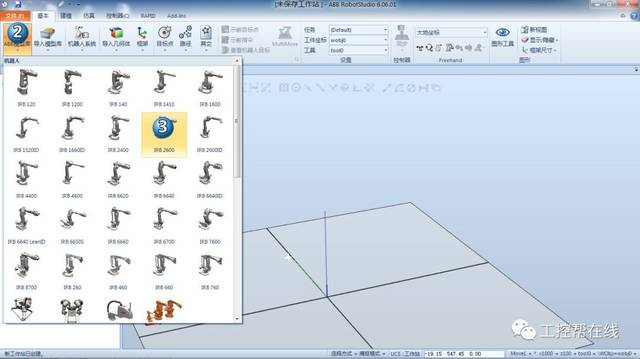
导入一台IRB2600机器人
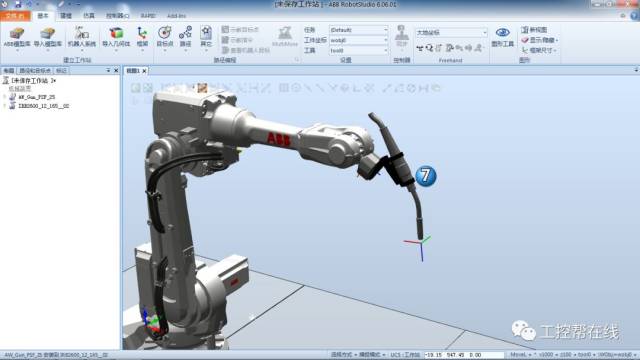
导入一把焊枪

安装一把焊枪工具
建立机器人系统,建立系统时将DeviceNet和中文选项包勾选。

建立好系统后建立两个数字输出信号用于控制变变位机的两个位置。

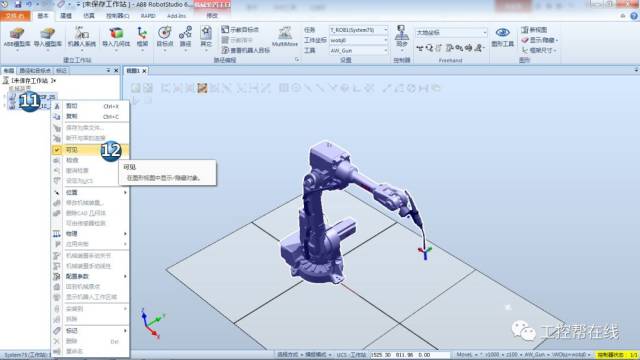
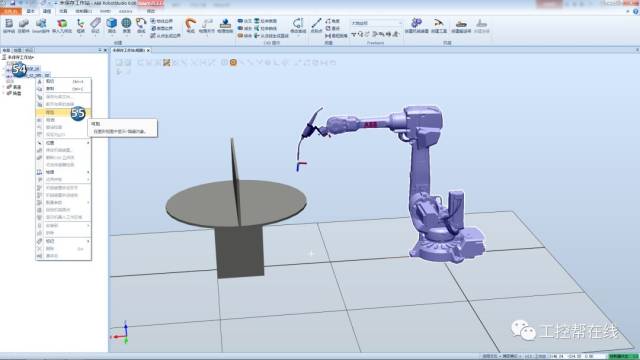
然后在布局中将机器人和工具选中,单击鼠标右键取消勾选”可见”
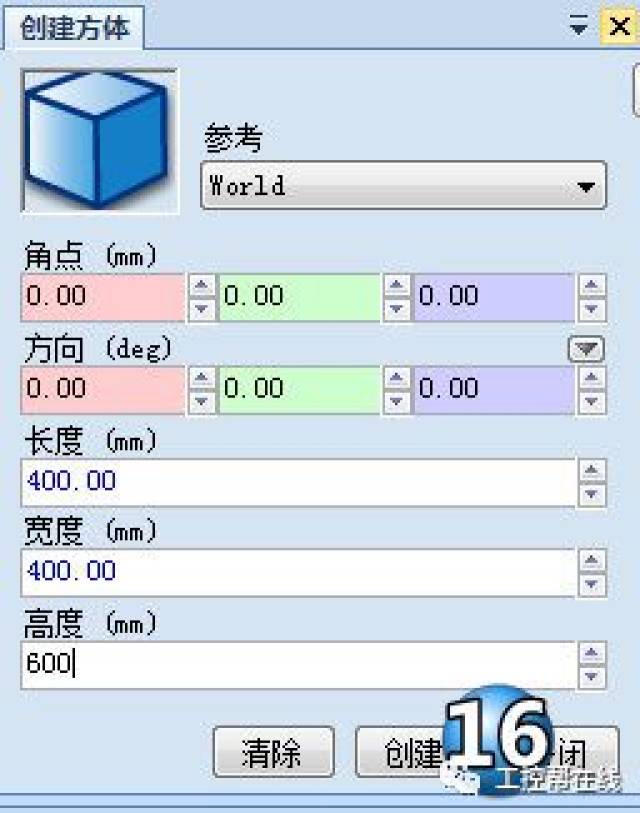
切换到建模选项卡,创建一个矩形体。
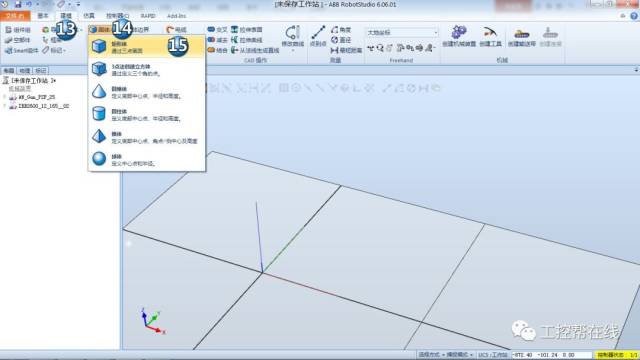
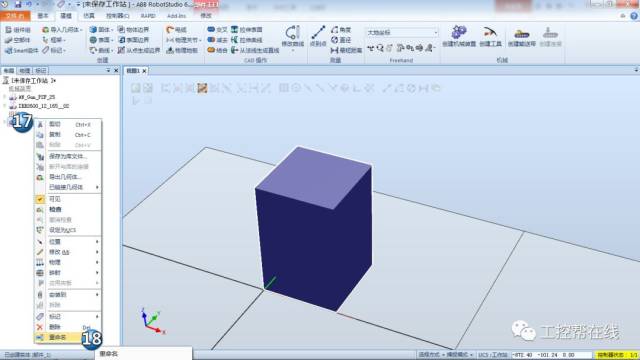
矩形体的参数如下图,输入完成之后点击创建。
右键创建出来的矩形体,重命名为底座。
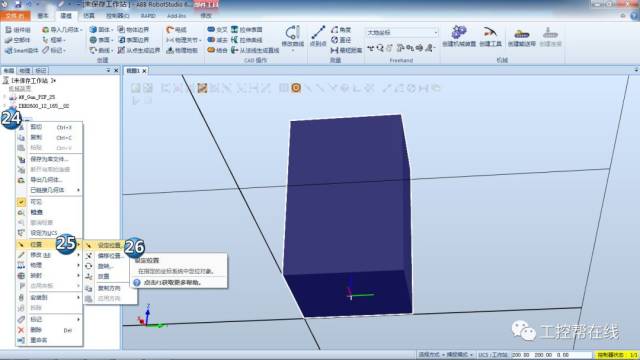
然后对底座设定本地原点。
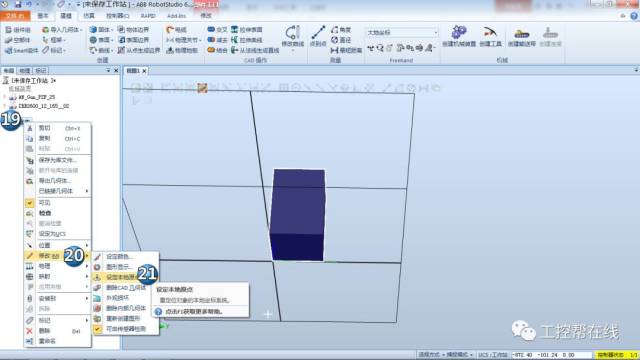
选择捕捉中心工具,将本地原点设定为底座的下表面中心之后单击应用(这一步是将描述物体位置和姿态的坐标系设定到物体下表面中心)。
对底座进行位置设定位置。
将里面的数字改成0后单击应用。

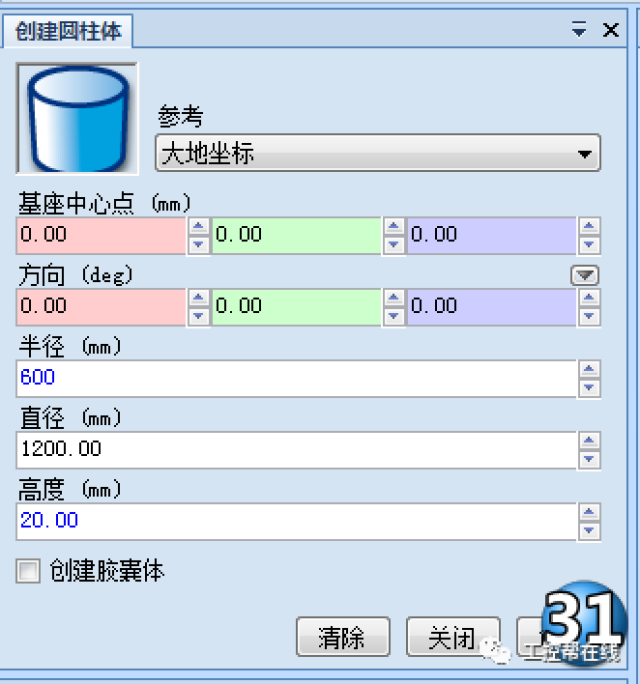
然后继续建立模型,创建一个圆柱体。
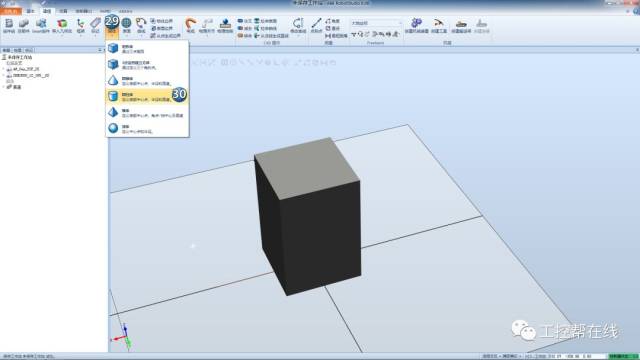
参数如下,输入完成后单击”创建”。
然后对其进行设定位置
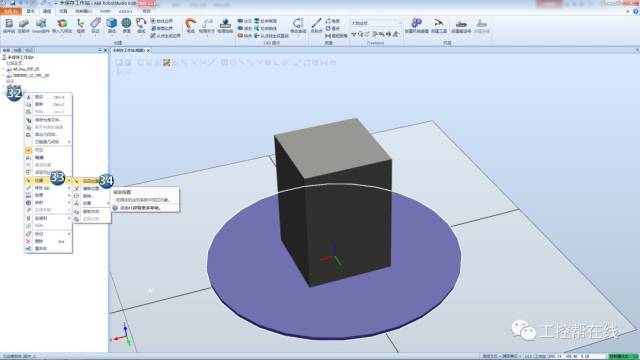
设定位置参数如下,填完参数后单击应用。
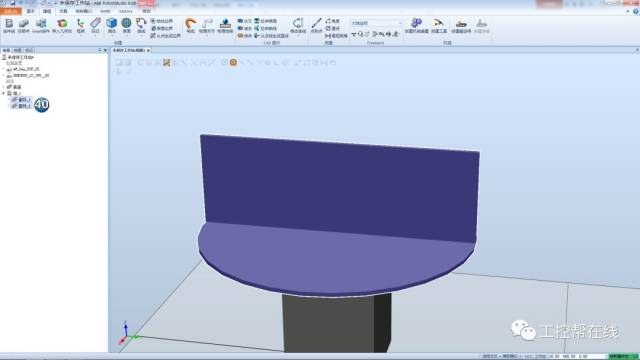
再次创建一个矩形体,参数如下。

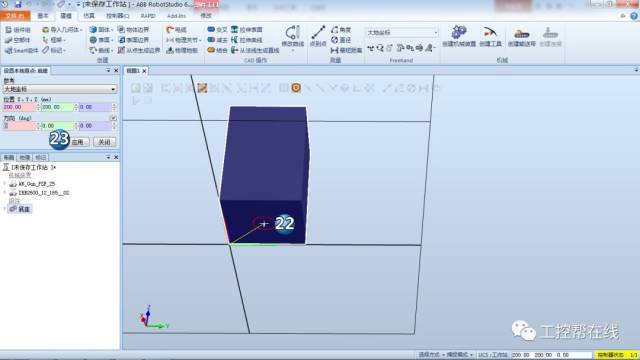
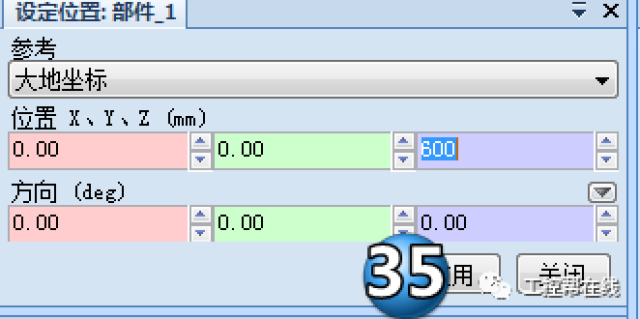
对其设定本地原点,将其本地原点设定到矩形体的下表面中心。
对其进行位置设定位置,参数如下。
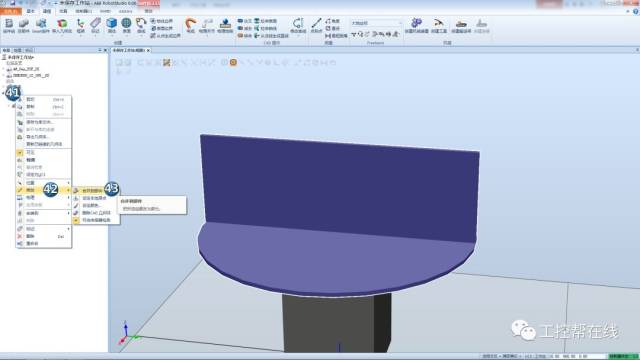
创建一个组件组用于将两个部件合成到一起。
将两个部件拖放到组_1里面,注意底座不拖入。
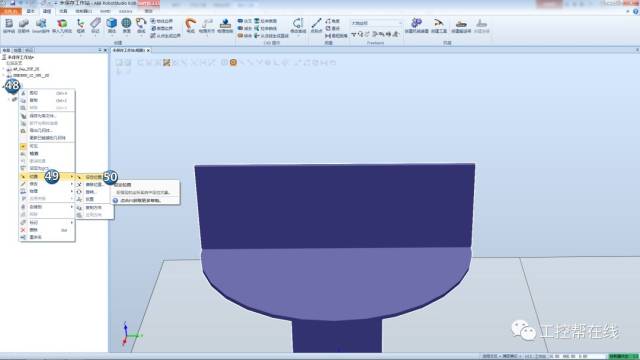
右键”组件组”在下拉菜单中选择”修改”然后选择”合并到部件”。
将”组_1”删除。
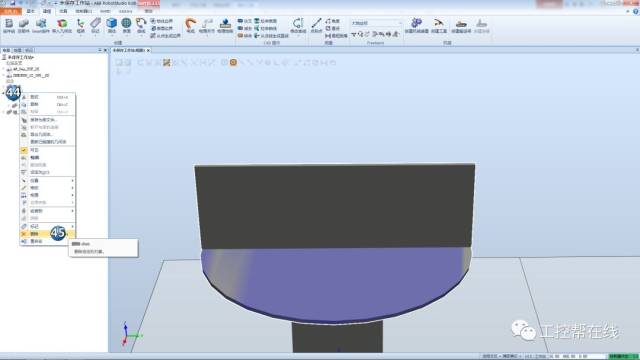
将组_1合并的部件重命名为”转盘”。
再次创建一个组件组用于整体移动,将底座和转盘拖入。
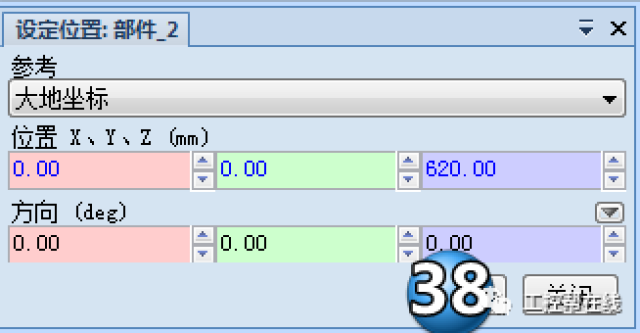
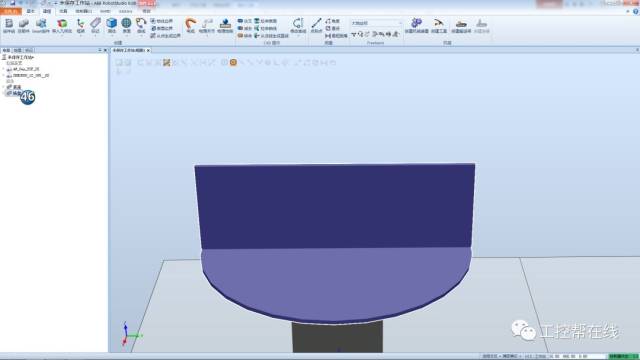
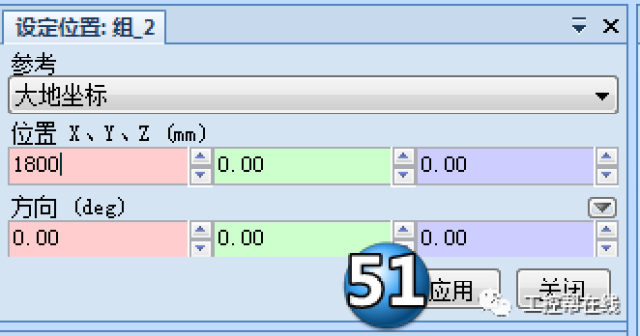
对组_2整体进行设定位置。
设定位置参数如下,设定完成后单击应用。
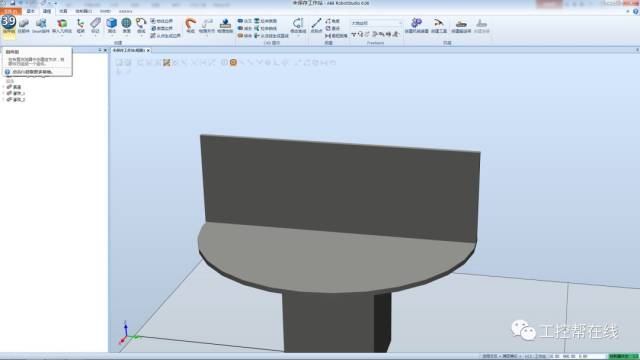
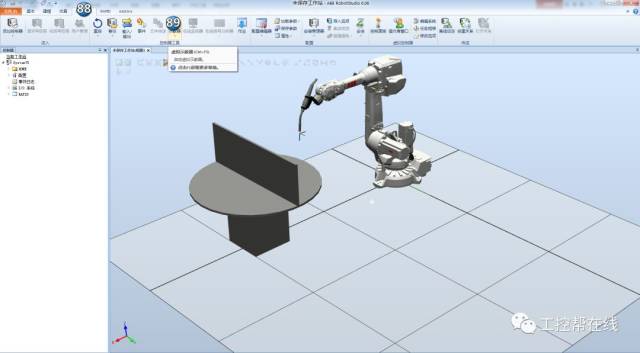
设定位置完成后将组_2里面的底座和转盘拖放到工作站中(出现是否从新定位选择否),之后将组_2删除。
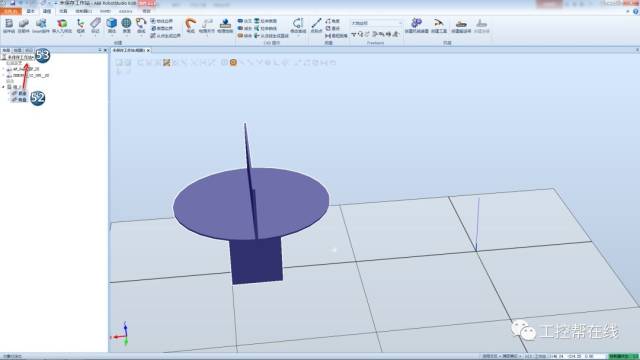
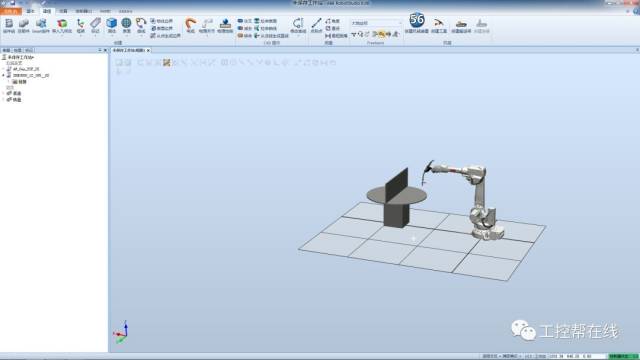
将机器人与焊枪勾选”可见”。
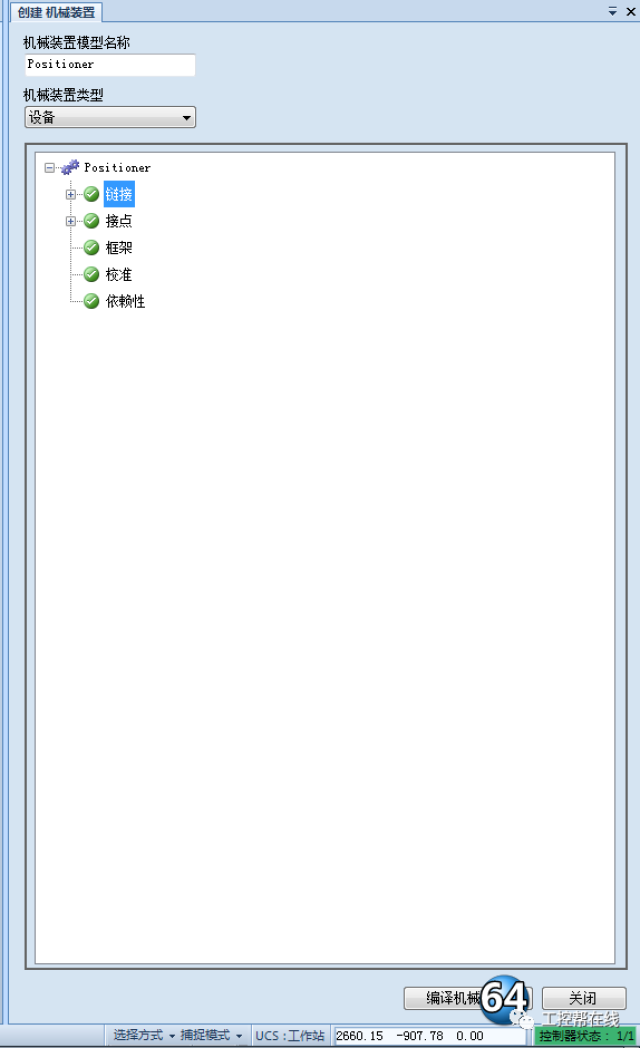
点击创建机械装置。
命名成自己喜欢的名称。
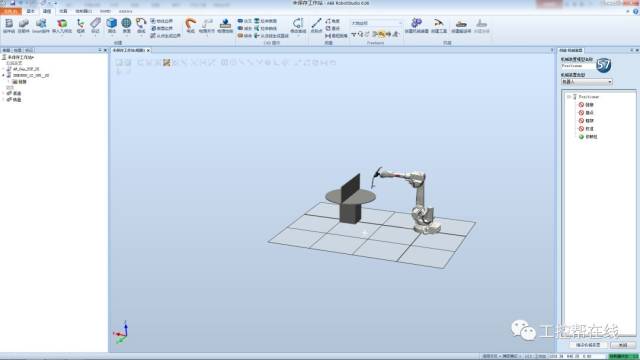
设定机械装置类型为设备。
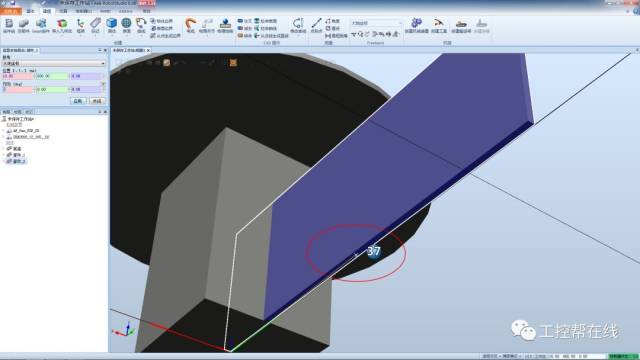
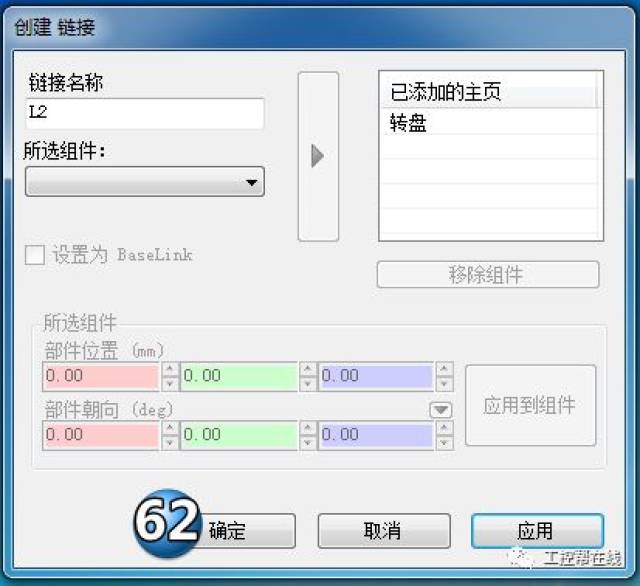
双击”链接”进入创建连接界面按下图设定,设定完成后单击右添加箭头,将连接添加到主页上。

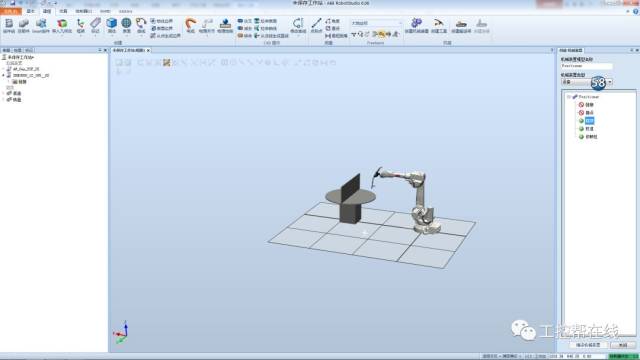
然后单击”应用”。
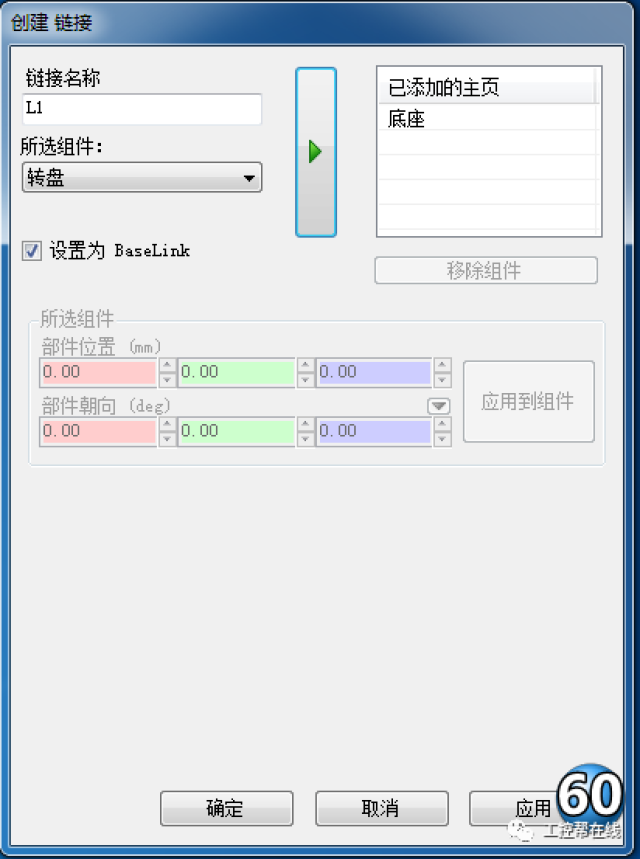

添加完成后单击”确定”。
双击接点,按下图所示设置参数,设置完成后单击确定。

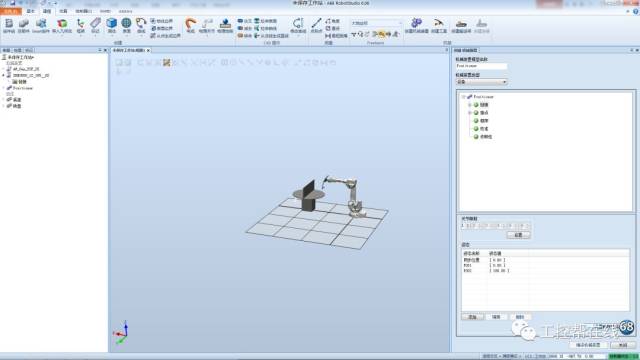
点击编译机械装置。
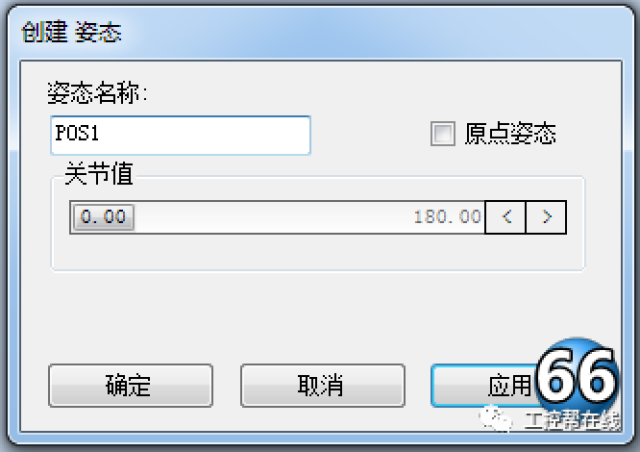
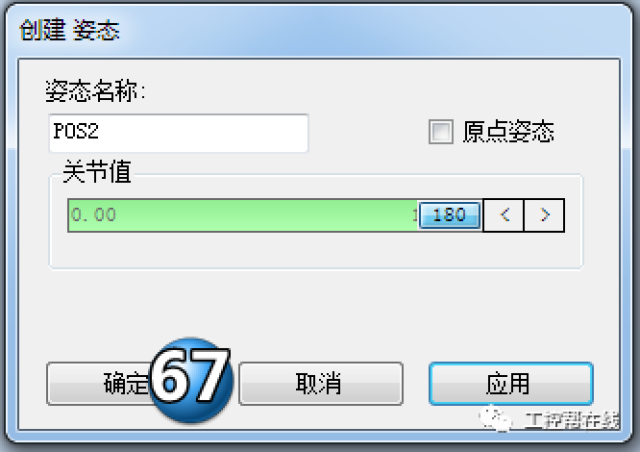
添加如下两个姿态。
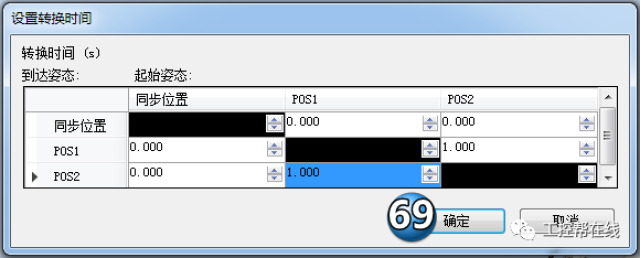
然后设置姿态间的转换时间。
设置完成后单击”确定”。
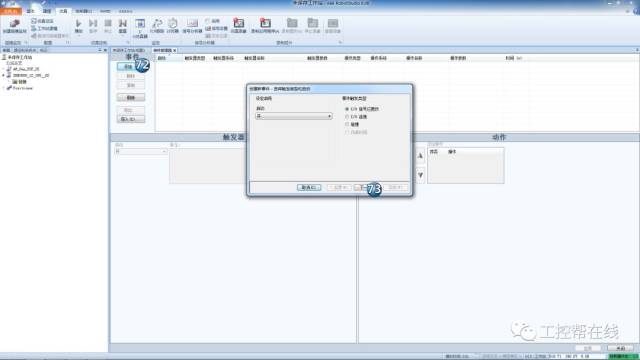
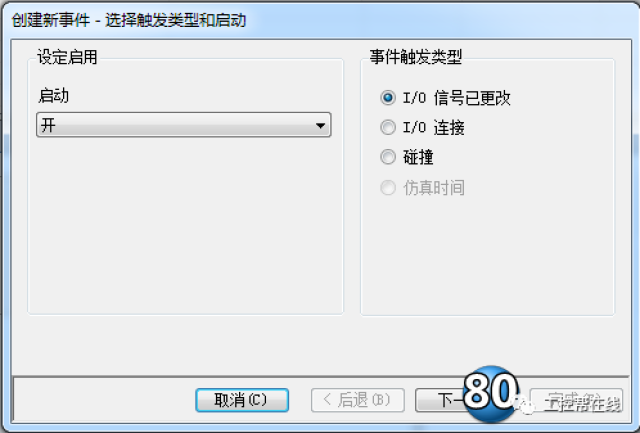
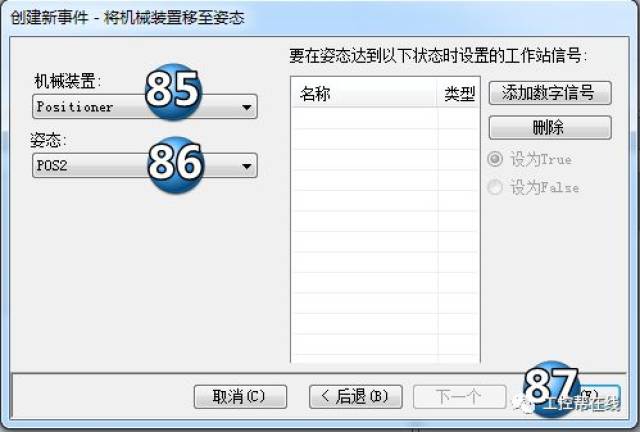
切换到仿真选项卡下,打开配置旁边的时间管理器。
单击”下一个”
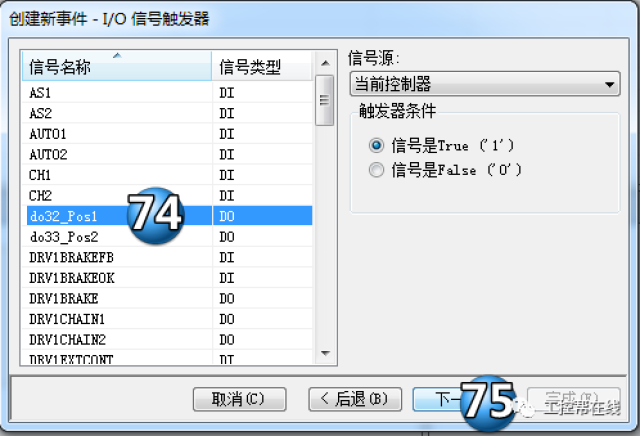
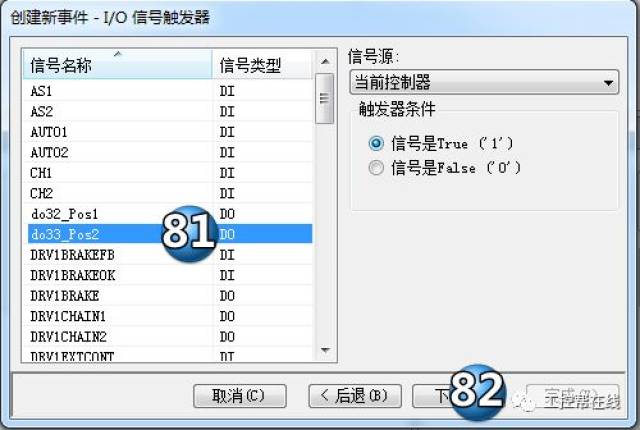
选择”do32_Pos1”然后单击下一个。
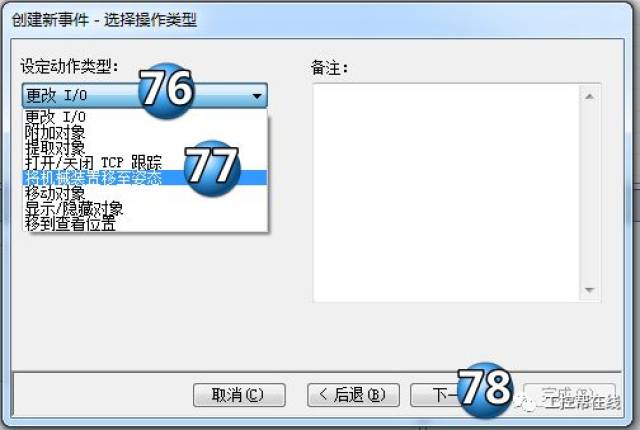
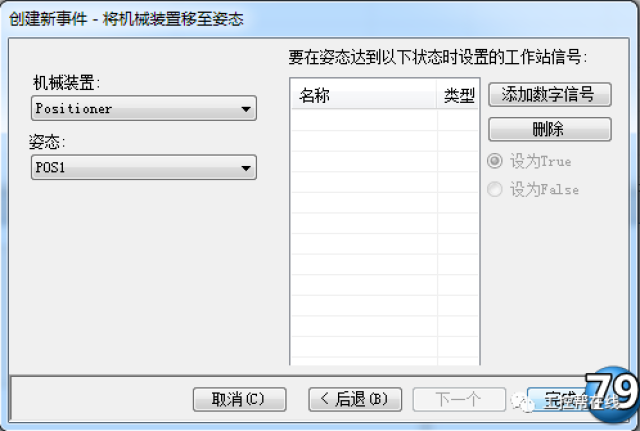
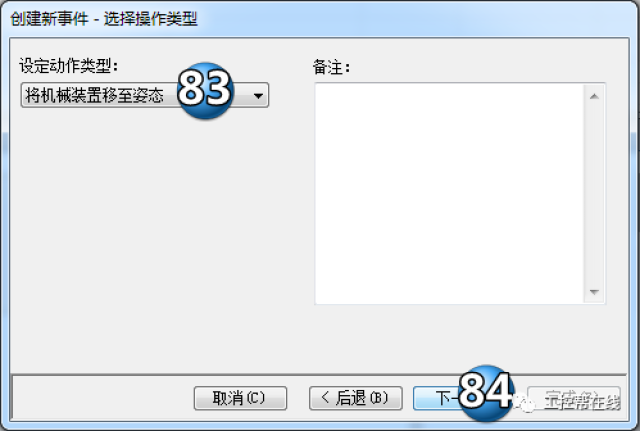
按下图设定后单击”下一个”。
按下图设定后单击”完成”。
下一个设置也和这一条类似,所以只给出步骤。
设置完成后就可以测试了,切换到控制器选项卡,打开示教器。
打开输入输出界面,分别对Pos1与Pos2进行置一置0操作,变位机就会响应信号移动到对应的位置。

-
仿真
+关注
关注
50文章
4073浏览量
133555 -
旋转机械
+关注
关注
1文章
27浏览量
11312
原文标题:在RobotStudio中如何创建并控制变位机?
文章出处:【微信号:GKB1508,微信公众号:工控帮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RobotStudio随真实控制器安装选项及应用

怎么安装离线编程软件RobotStudio?

如何创建和使用Xilinx的UltraScale PCI Express解决方案
FreeRTOS任务如何创建和删除?
焊接变位机是什么,有哪些特点
焊接变位机如何进行调试,有哪些注意事项
焊接变位机的特点是怎样的
焊接变位机是什么 有哪些作用
焊接变位机如何选型?

深度剖析:MT6816 磁编码 IC 在机器人焊接变位机中的应用





 工商网监
工商网监
评论