 如何将FSR与NodeMCU连接
如何将FSR与NodeMCU连接
步骤1:需要的组件
所需的一切。
需要硬件
NodeMCU
FSR(力敏电阻)
10K欧姆电阻器
面包板
Micro USB线
连接线
需要软件
第2步:描述
伺服电机是可以转到指定位置的绝佳设备。
通常,它们有一个可以从0到180度转动的伺服臂。
通常 FSR 是电阻器,它会改变其电阻值(欧姆)取决于多少它的力/压力施加在它上面。
因此,使用NodeMCU,我们通过在FSR上施加力将伺服臂控制到指定位置。就这么简单!
将伺服电机与NodeMCU接口
接口强制电阻到NodeMCU
第3步:电路接线
无焊接技巧是必需的,因为我们将使用面包板。
FSR 连接 非常简单,请参阅电路图。
伺服连接 :
橙色导线连接到数字引脚 D2。
布朗导线连接到 GND 引脚。
红色导线连接到 3v3 pin。
第4步:编码时间
CODE
#include Servo servo;
const int sensorOut = A0; // Pin A0 to read analog input
//Variables:
int pressure; //To store analog value void setup(){
Serial.begin(9600); // Begin serial communication
servo.attach(4); //D2
servo.write(0);
delay(1000);
} void loop(){
pressure = analogRead(sensorOut); //Read and store analog value from Force Sensitive Resistance
Serial.println(pressure); //Print value
pressure = map(pressure, 0, 1023, 0, 180);//Map value 0-1023 to 0-255 (PWM)
servo.write(pressure);
delay(100);
}
下载“ Control servo arm_FSR.ino ”文件并在Arduino IDE中打开它。
然后创建一个新草图并将下面的代码粘贴到Arduino IDE中并点击Upload。你可以根据应用程序修改它,或者只是按原样使用它。
步骤5:输出
使用串行监视器,您可以检查连接到FSR的interwetten与威廉的赔率体系 引脚的输出。
根据施加的压力,伺服臂转动。
-
NODEMCU
+关注
关注
13文章
289浏览量
21416 -
FSR
+关注
关注
0文章
33浏览量
6633
发布评论请先 登录
相关推荐
微软推出DirectSR接口,集成FSR 3.1等SR威廉希尔官方网站 提升游戏体验

如何将GPIO修改为QSPI SLSO?
为什么无法在nodemcu和arduino mega之间交换数据?
如何将数组的的字符重新连接起来保存?
AMD发布FSR 3.1版,新增API及画质优化
如何将TX模式设备MULTICH_CONNECT_PCB连接到RX模式设备?
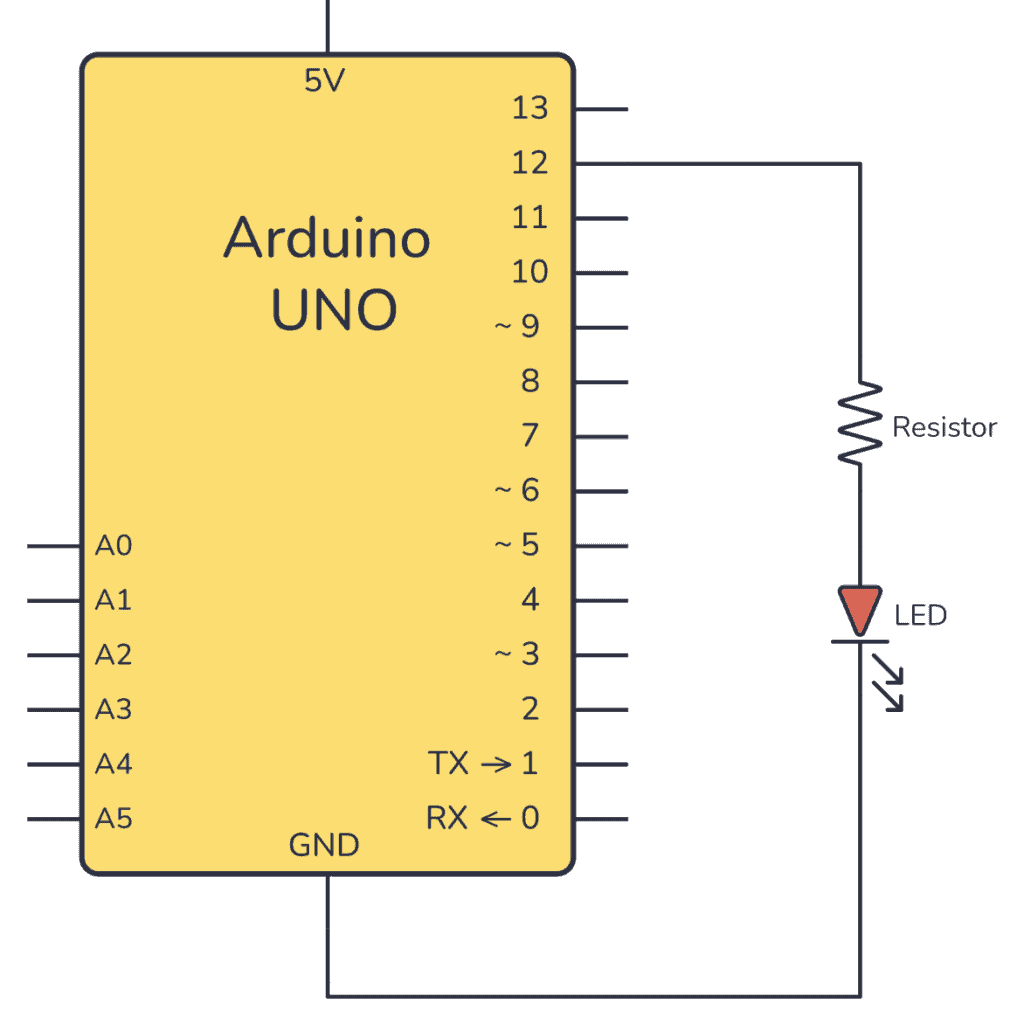
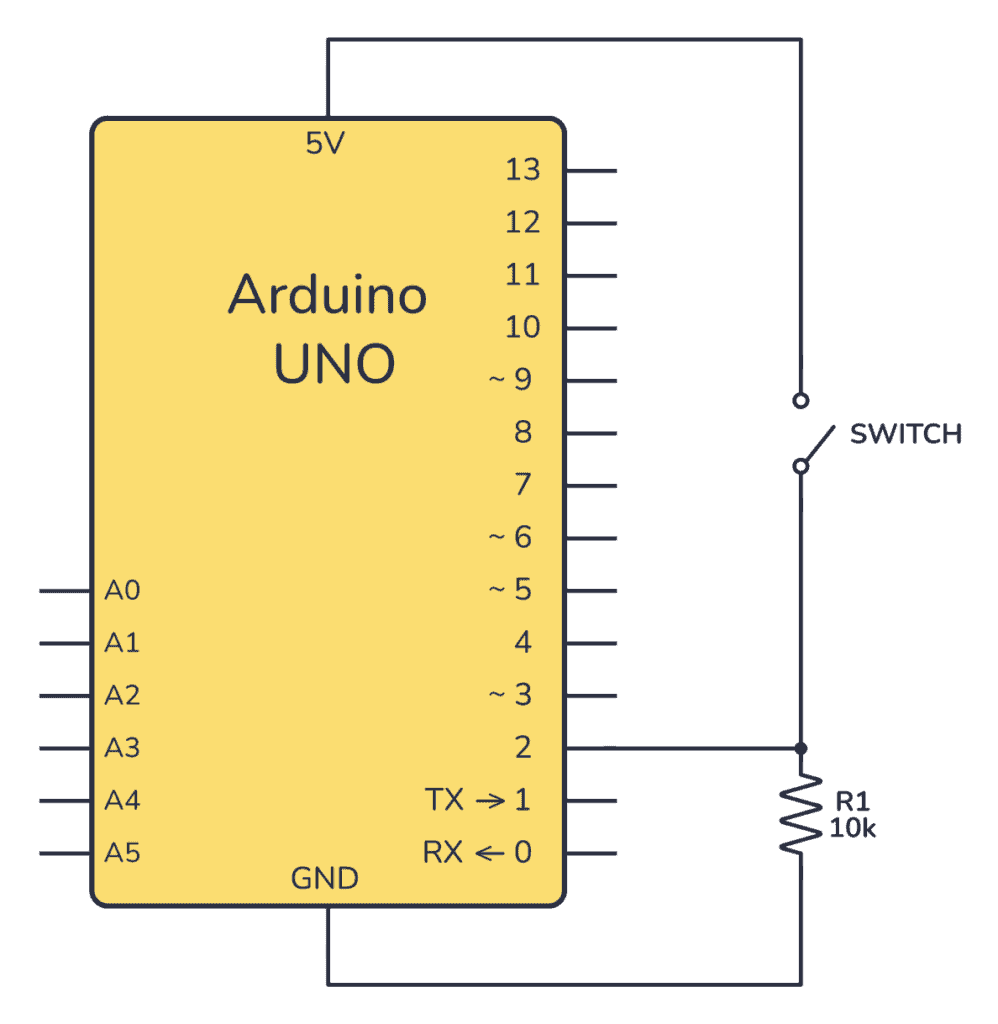
如何将按钮连接到Arduino板
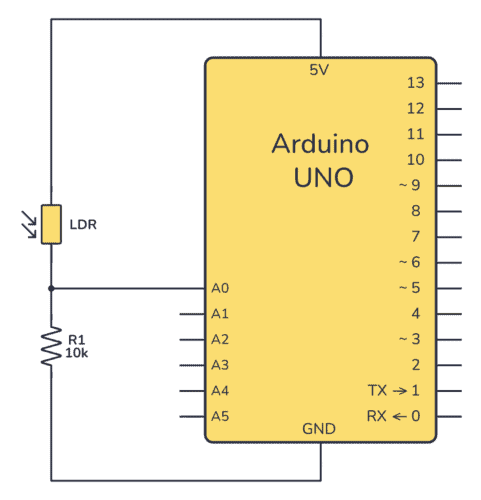
如何将光敏电阻连接到Arduino板并读取电压
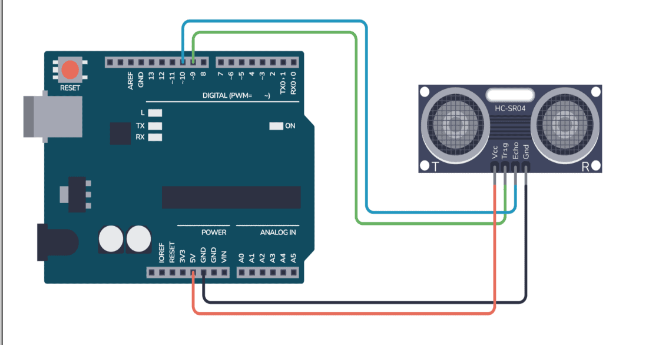
如何将HC-SR04连接到Arduino并编写一个简单的程序来测量距离
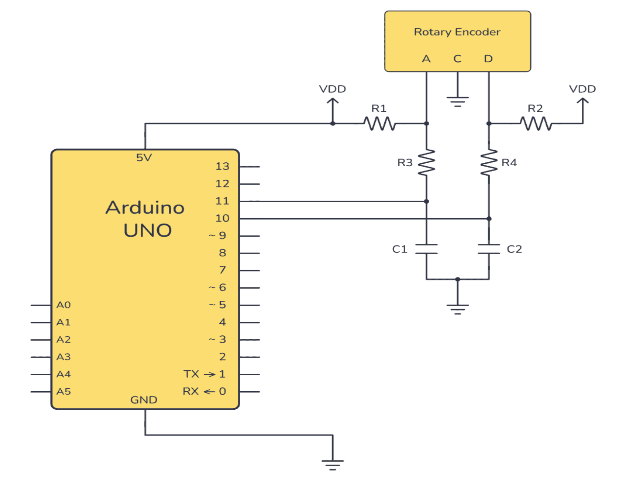
如何将增量旋转编码器与Arduino连接
如何将Klayout Cell动态导入Lumerical Multiphysics






 工商网监
工商网监
评论